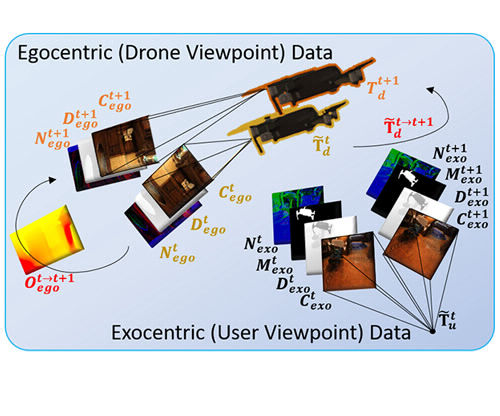
A multimodal UAV assistant dataset
Photorealistic UAV-Assistant Dataset Synthesis for 3D Pose Estimation via a Smooth Silhouette Loss
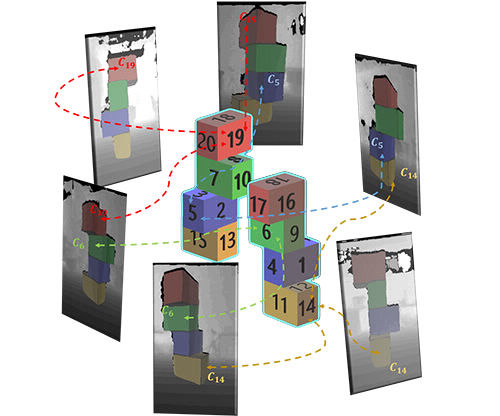
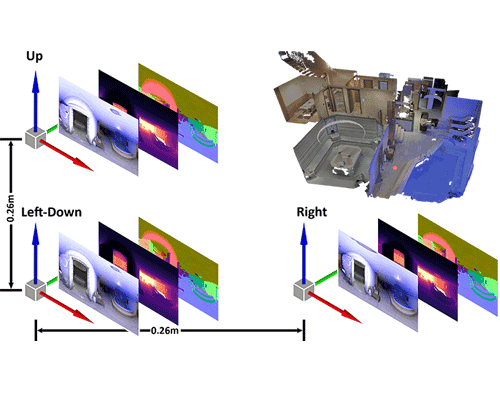
Markerless volumetric (multi-sensor) alignment for depth sensors
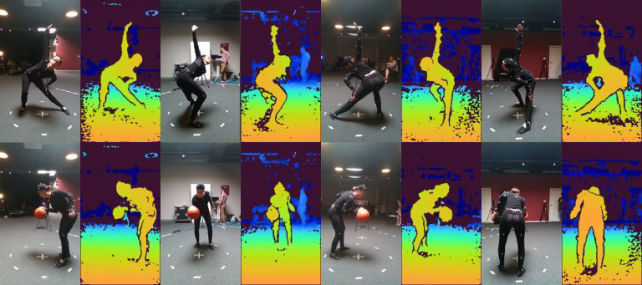
Contains a variety of human activities simultaneously captured by a professional marker-based MoCap, a volumetric capture and an audio recording system.

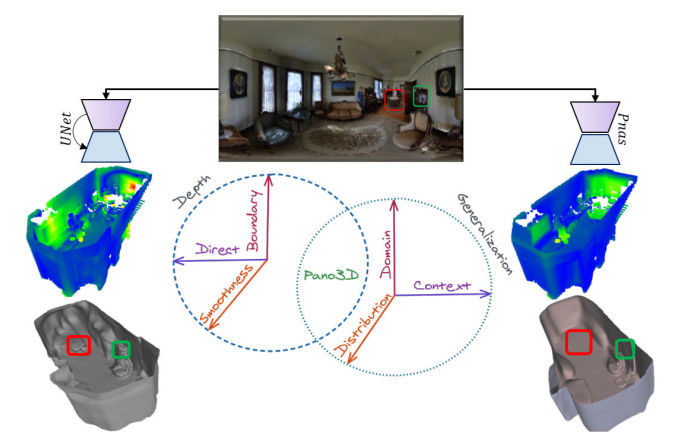
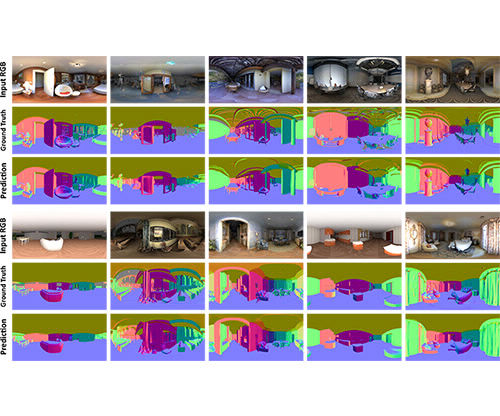
Self-Supervised 360o Depth Estimation
3D Vision Indoors Spherical Panoramas
Pre-trained models for Intel RealSense D415
Deep Lighting Environment Map Estimation from Spherical Panoramas
Code accompanying the paper "360 Surface Regression with a Hyper-Sphere Loss", 3DV 2019
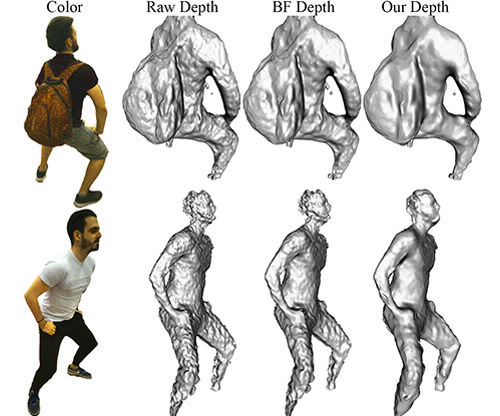
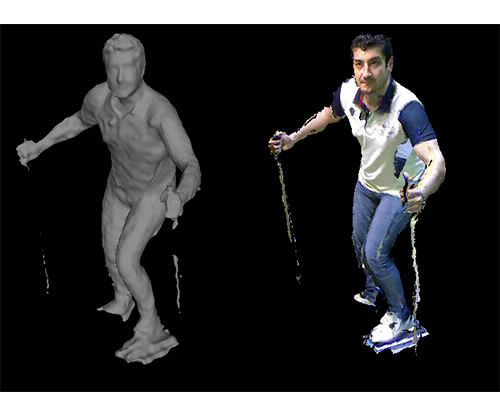
Blending the real and the virtual through real-time volumetric capture
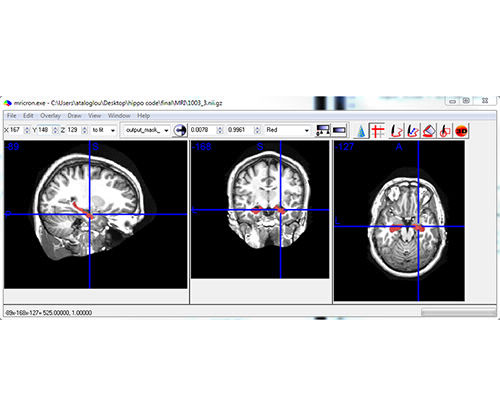
Fast and precise hippocampus segmentation through deep convolutional neural network ensembles and transfer learning
A multi-sensor capture system for free viewpoint video
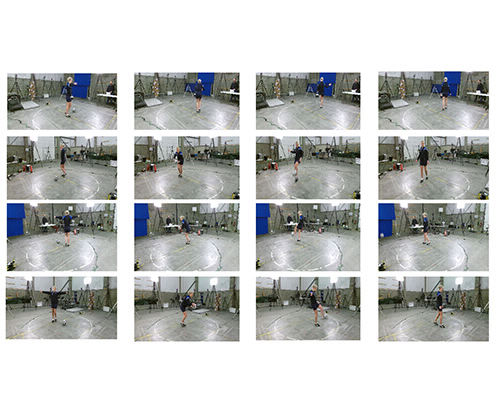
The data were obtained using two different capturing setups, both with multiple Kinects2 in a circular configuration
Three different capturing setups are realized, each with 5 Kinects in a circular configuration

The CERTH/ITI dataset of Kinect-based 3D scans

The dataset was recorded with a multi-Kinect2 capturing setup in a circular configuration
Site was started with Mobirise